Challenge
The project of the autonomous trolley (AGV) was carried out on behalf of a partner from Germany and was the second, more complex order from this Customer. The design idea was to build a completely robotic control system co-operating with the sensor and execution systems, supplied by the Customer, mounted on a frame, also prepared by the Customer.
In the conceptual phase, a broad review of possible solutions was carried out in order to build competencies and minimise the risk of the project failing. As a result of this work, a solution, consisting of two main parts was proposed, namely, hardware and software; due to the limited duration of the project, it was decided to use the ready-made electronic components and modules available on the market. For the same reason, the ROS operating system, dedicated to robotic applications, was chosen to create the control software.
“The project of an autonomous robot was the first of its kind to be implemented at FastLogic. The design team had to constantly update their knowledge in the following areas: mechanical engineering, electrical engineering, automation and computer science, as well as technology. Despite the meticulous planning of the work, many problems, arising at the interface between these areas had to be solved “in real time”, which sometimes also involved changing the initial assumptions of the design. The very issue of the functional testing of the device was a logistical challenge, since it was necessary to rent a special hall, in order to do so.”
Jakub, Project Manager
In the early phase of the project, the team analysed the existing hardware and software solutions used in the AGV-class autonomous devices. At the same time, consultations with potential contractors of the mechanical part, namely, the robotic frame, were carried out, which resulted in a preliminary design for the drive control system and a pre-selected set of motors. Also at the same time, the team completed the necessary hardware components and began to prepare the on-board computer software, in terms of initiating communication with sensors and actuators and implementing target control algorithms.
As co-operation with the subcontractor of the frame did not materialise, the Customer, using his own resources, built a mechanical part sufficient to carry out further development work. The frame, apart from the drive unit, had, among other things, mounted target sensors – SICK laser scanners and proprietary safety systems provided by the Customer. On the platform, configured in this way, the team installed a previously prepared control module with a computer and integrated the whole unit.
The final tests confirmed the potential of the device thus prepared. Problems with the robot’s navigation, resulting from wheel slip, were detected and diagnosed. In addition, a significant computational load on the on-board computer was observed, resulting from the processing of stereo-vision. These two problems were corrected in the second iteration of the machine: the design of the new frame included improved suspension, while the existing cameras were replaced by a model with an integrated inertial navigation unit (IMU). Finally, a 2D LIDAR scanner was used to detect low obstacles. In addition, the ability to confirm the position of the AVG robot, based on the reading of RFID tags, was added.
Results & Benefits
As part of the project, the team developed a functional prototype of the AGV robotic control system, which is its first developmental iteration. All key subsystems were started and programmed, including an on-board computer, sensors, drives, BMS battery, safety subsystems (bumpers) and signalling with LED strips. On this basis, a series of functional and performance tests were carried out, the conclusions of which served as the basis for the second iteration, in that, it was planned to increase the resources of the on-board computer and so, the cameras and the sensors, used to detect low obstacles, were changed, the problem with the battery BMS was fixed and a new one was designed, already equipped with suspension and a robotic frame. The prototype prepared in this way can be further developed by the Customer’s team, in order to impart those functionalities, relevant from a business point of view.
The team was supported by the Customer’s Engineering Department at every stage of the work, starting from the development of the device drive concept, through indication of the important technical parameters of the selected modules and ending with direct support for the Customer.
Key Solutions
- Development of a complete hardware architecture of the system
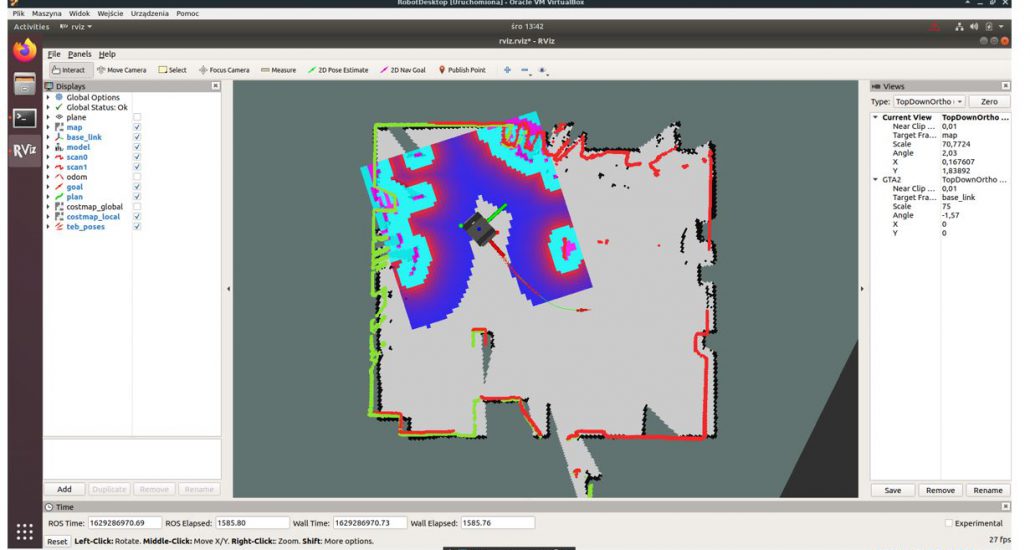
- Development of key software modules for the ROS operating system, including an autonomous, navigation algorithm
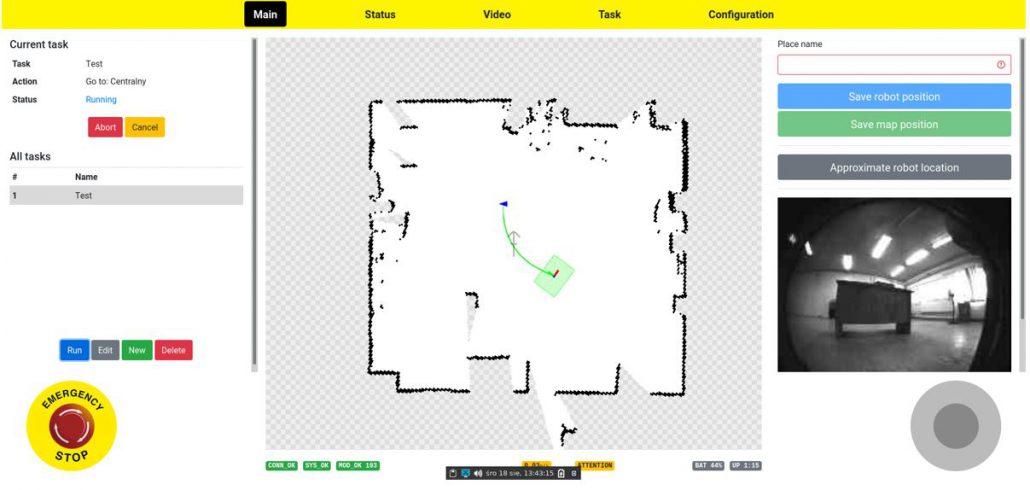
- Development of a PC web operator application
- Development of project documentation
Volume and coverage
The product is planned to be delivered throughout the European Union, the production volume is currently unknown; after the completion of tests in the real environment; it will probably be several dozen per year.