Wyzwanie
Projekt wózka autonomicznego (AGV) został zrealizowany na zlecenie partnera z Niemiec, i było to drugie, bardziej złożone, zlecenie od tego Klienta. Założeniem projektowym było zbudowanie kompletnego systemu sterowania robotem współpracującego z układami sensorycznymi i wykonawczymi dostarczonymi przez Klienta, osadzonego na przygotowanej przez Klienta ramie.
W fazie koncepcyjnej wykonano szeroki przegląd pod kątem możliwych rozwiązań, tak aby zbudować kompetencje i zminimalizować ryzyko niepowodzenia przedsięwzięcia. W wyniku tych prac zaproponowano rozwiązanie składające się z dwóch zasadniczych części: sprzętowej oraz oprogramowania, przy czym z uwagi na ograniczony czas trwania projektu podjęto decyzję o wykorzystaniu gotowych, dostępnych na rynku, komponentów i modułów elektronicznych. Z tego samego powodu do stworzenia oprogramowania sterującego wybrano dedykowany do zastosowań robotycznych system operacyjny ROS.
„Projekt robota autonomicznego był pierwszym tego typu projektem realizowanym w FastLogic. Zespół projektowy musiał na bieżąco uzupełniać wiedzę z zakresu: inżynierii mechanicznej, elektrotechniki, automatyki i informatyki, a także technologii. Pomimo drobiazgowego zaplanowania prac, wiele problemów powstałych na stylu tych dziedzin trzeba było rozwiązywać „w czasie rzeczywistym”, co niekiedy wiązało się również ze zmianą wstępnych założeń projektowych. Sama kwestia testów funkcjonalnych urządzenia była wyzwaniem logistycznym, ponieważ do ich przeprowadzenia niezbędne było wynajęcie specjalnej hali.”
Jakub, Project Manager
We wczesnej fazie projektu zespół przeanalizował istniejące rozwiązania sprzętowe i programowe stosowane w urządzeniach autonomicznych klasy AGV. Równolegle trwały konsultacje z potencjalnymi wykonawcami części mechanicznej – ramy robota – czego wynikiem był wstępny projekt układu sterowania napędem oraz wstępnie dobrany zestaw silników. W tym samym czasie zespół skompletował potrzebne komponenty sprzętowe oraz rozpoczął przygotowywanie oprogramowania komputera pokładowego pod kątem uruchomienia komunikacji z czujnikami i elementami wykonawczymi oraz implementacji docelowych algorytmów sterowania.
Ponieważ współpraca z podwykonawcą ramy nie doszła do skutku, Klient własnymi siłami zbudował część mechaniczną wystarczającą do przeprowadzenia dalszych prac deweloperskich. Rama, poza zespołem napędowym posiadała zamontowane m.in. docelową sensorykę – skanery laserowe SICK, autorskie systemy bezpieczeństwa dostarczone przez Klienta. Na tak skonfigurowanej platformie zespół zainstalował przygotowany wcześniej moduł kontrolny z komputerem i przeprowadził integrację całości.
Finalnie wykonane testy potwierdziły potencjał przygotowanego urządzenia. Wykryto i diagnozowano problemy z nawigacją robota wynikające z uślizgu kół. Ponadto zaobserwowano znaczne obciążenie obliczeniowe komputera pokładowego, wynikające z przetwarzania stereowizji. Te dwa problemy zostały usunięte w drugiej iteracji maszyny: w projekcie nowej ramy uwzględniono ulepszone zawieszenie, natomiast dotychczasowe kamery zastąpiono modelem, z wbudowanym modułem nawigacji inercyjnej (IMU). Ostatecznie do wykrywania przeszkód niskich wykorzystano skaner 2D typu LIDAR. Ponadto dodano możliwość potwierdzenia pozycji robota AVG na podstawie odczytu tagów RFID.
Wyniki i Korzyści
W ramach projektu zespół opracował funkcjonalny prototyp systemu sterowania robota AGV, będący jego pierwszą, rozwojową, iteracją. Uruchomiono i oprogramowano wszystkie kluczowe podsystemy, m.in komputer pokładowy, czujniki, napędy, BMS akumulatora, podsystemy bezpieczeństwa (zderzaki), sygnalizację listwami LED. Na tej podstawie wykonano serię testów funkcjonalnych i wydajnościowych, z których wnioski posłużyły za bazę dla iteracji drugiej, m.in zaplanowano zwiększenie zasobów komputera pokładowego, zmieniono zastosowane kamery oraz sensory do wykrywania przeszkód niskich, naprawiono problem z BMS akumulatora oraz zaprojektowano nową, posiadającą już zawieszenie, ramę robota. Tak przygotowany prototyp może być dalej rozwijany przez zespół Klienta, w celu nadania funkcjonalności istotnych z biznesowego punktu widzenia.
Zespół wspierał dział inżynieryjny Klienta na każdym etapie prac, począwszy od opracowywania koncepcji napędu urządzenia, przez wskazywanie istotnych parametrów technicznych dobieranych modułów a na bezpośrednim wsparciu u Klienta kończąc.
Kluczowe Rozwiązania
- Opracowanie kompletnej architektury sprzętowej systemu
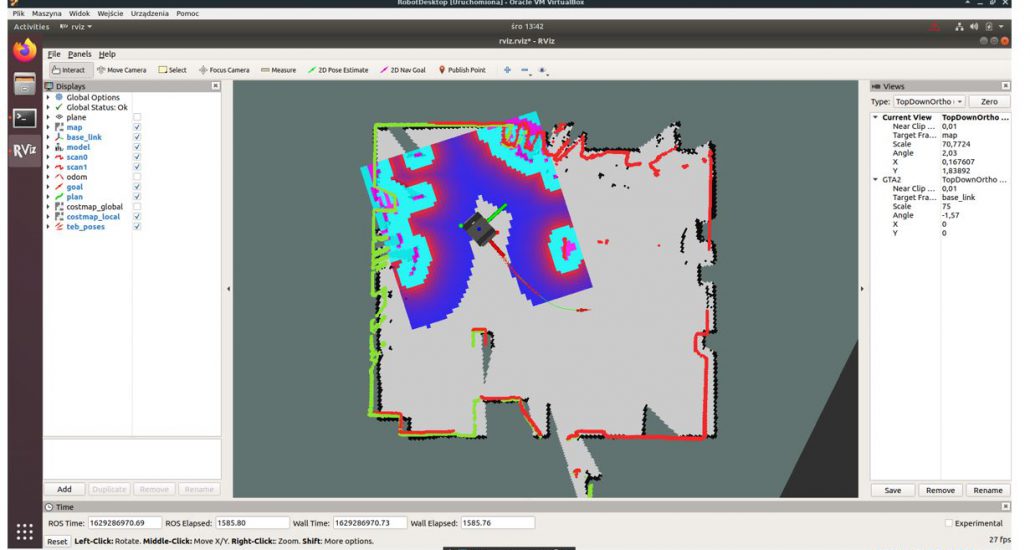
- Opracowanie kluczowych modułów oprogramowania dla systemu operacyjnego ROS, w tym algorytmu nawigacji autonomicznej
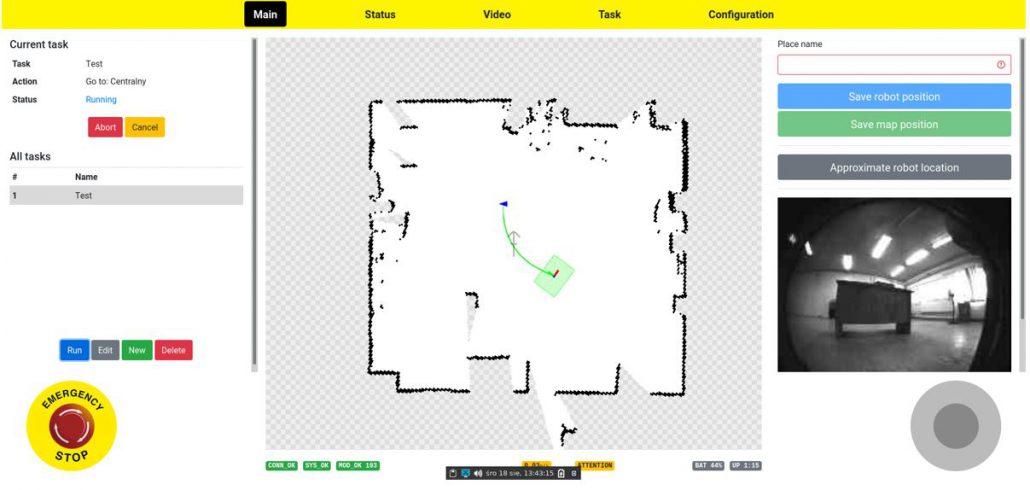
- Opracowanie webowej aplikacji operatorskiej PC
- Opracowanie dokumentacji projektowej
Wolumen i zasięg
Planowane jest wdrożenie produktu na terenie Unii Europejskiej, wolumen produkcji nie jest obecnie znany; po zakończeniu testów w środowisku rzeczywistym prawdopodobnie będzie to kilkadziesiąt sztuk rocznie.